即將進行大洋航次了,按照慣例要進行MRU羅經和星站GPS(NavComSF3050)的測試檢查
檢查工具
2套華星CORS站(使用的是千尋的信號),1個直流電源,NavCom備用電源線,同軸纜以及天線。
GPS檢查過程
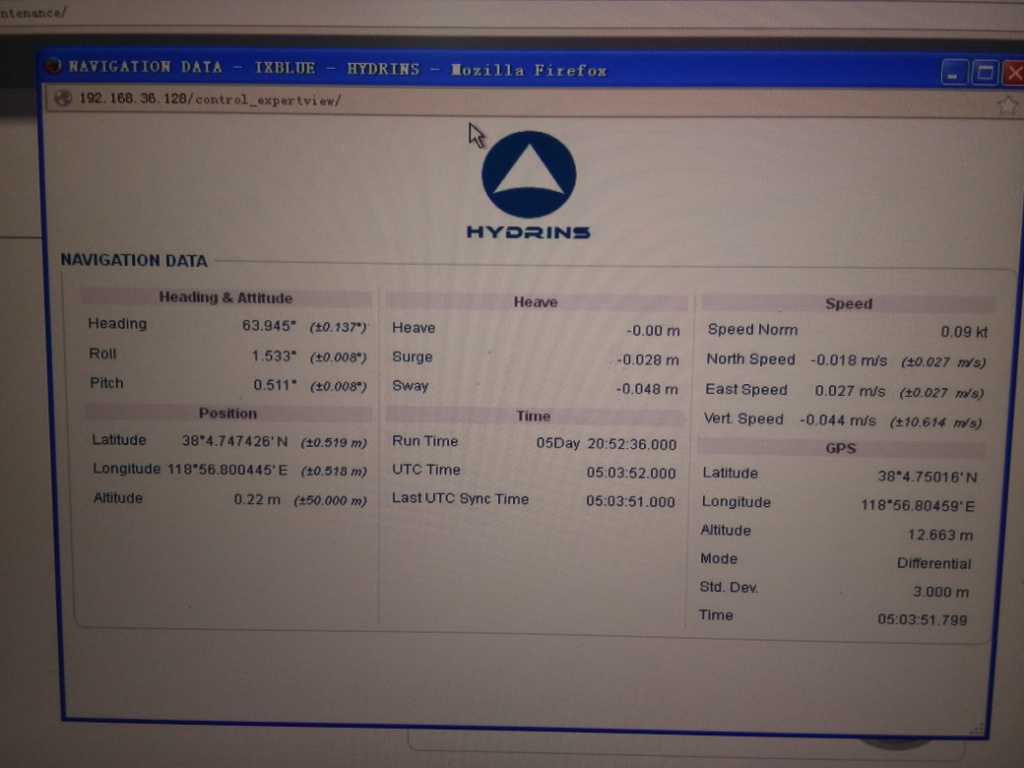
在Seapath330的主界面,發現差分信號不能用,檢查NavComSF3050的主機,發現船上主機的4個燈都在快速閃爍,跟 *** 溝通,懷疑是電源的問題,檢查了直流電源是正常的,用電壓表測量了一下電壓,11.8V。

添加微信好友, 獲取更多信息
復制微信號
將NavComSF3050主機拿下來以后,用自帶直流電源、天線和同軸纜,燈都是正常的,GPS燈常亮(綠色),差分信號燈常亮(綠色),隨后進行穩定性和準確性檢測,先用千尋CORS測出準確坐標,然后將NavCom天線替換CORS天線,測定NavCom的穩定性和準確性檢測。

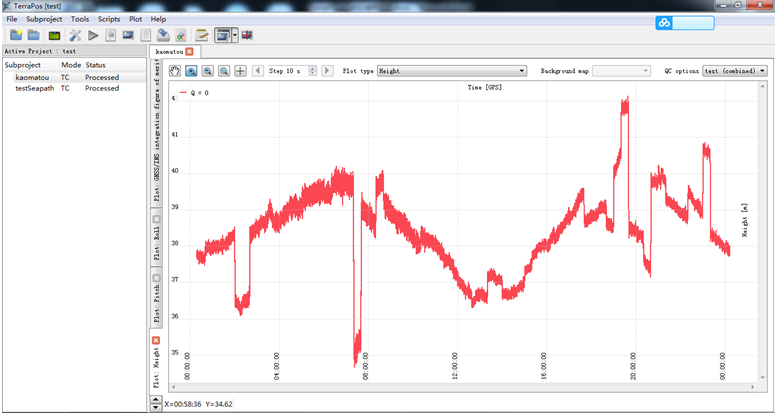
用HYPACK采集定位數據,首先發現COM口沒有輸出數據,但是MOXA上的信號燈是有規律地一閃一閃的,說明數據輸入沒有問題,發現此MOXA是當做SLAVE模式使用的,需要將此改成Real COM模式。

然后,COM口有數據了,輸出的不是GGA,而是一堆亂碼,仔細回憶了一下,NavCom是輸出的RTCM差分信號,連接NavCom,設置GGA
//設置端口2的輸出參數
[OUTPUT]OK,ONCHANGE,,2
[OUTPUT]NMEAGGA,ONTIME,0.2,2
[OUTPUT]NMEAVTG,ONTIME,0.20,2
[OUTPUT]NMEAZDA,ONTIME,0.20,2
至此,COM口輸出了GGA數據,數據開始采集。
羅經檢查過程
船舶靠泊在碼頭,一直在緩慢地擺動,需要對照同時刻的船艏向,首先,打開船上的導航軟件,采集船舶的艏向,然后,要確定船中的前后位置,可以用米尺確定船尾和船首的中部,也可以采用船上的一些標志點/線,最后,測定船舶的艏向,可以用全站儀,也可以采用2臺CORS站的方式,由于環境受限(碼頭較窄,無法同時觀測到兩臺棱鏡),采用兩臺CORS站,由于CORS的精度是2cm,而羅經精度約0.065度,當船長為100m時,偏差為10cm,那么采用2臺CORS站也是可行的。
采用華星A10/A16,A10的蘑菇頭的SIM卡槽是以前大卡槽,有2個因為SIM卡彎曲無法檢測到信號,換了一個2代手簿,可將SIM卡放在第2代手薄中,這個時候,需要進行一些檢查和設置,首先,是否出現移動信號強度標志,然后是否打開 *** 連接,是否設定為手薄差分,如果不設置成手薄差分,蘑菇頭會一直有“未檢測到SIM卡”,最后檢查千尋的服務設置是否正確。

下面是中海達設備上的千尋設置,來自于
https://www.sohu.com/a/377108401_120435367
1.打開手簿軟件,進入設備界面,點擊“移動站”進入設置。
2.訪問千尋位置服務,通常選擇 “內置 *** ”或“手簿差分”。數據鏈選擇:當SIM卡插在接收機時數據鏈選擇“內置 *** ”,當SIM卡插在手簿時選擇“手簿差分”。 *** 天線選擇:“ *** 天線”根據實際情況選擇, *** 信號不好則選擇“外置天線”并連接外置天線;信號較好則可以使用內置天線。
3.“ *** 模式”根據不同的運營商可選“GPRS、G *** 、CDMA”。一般使用電信卡選擇“CDMA”,使用聯通和移動卡選擇“GPRS和G *** ”,“ *** 類型”一般選擇4G *** 優先,當信號不好時接收機會自動切換為3G和2G信號。
4.“運營商”:輸入“CMNET”,“用戶名和密碼”不用輸
5.服務器類型選擇“CORS”
6.可手動輸入千尋服務器域名或IP地址和端口,并輸入相應的千尋賬號用戶名和密碼
域名:rtk.ntrip.qxwz.com或填寫IP:203.107.45.154(更快速、更穩定、更安全,推薦!)
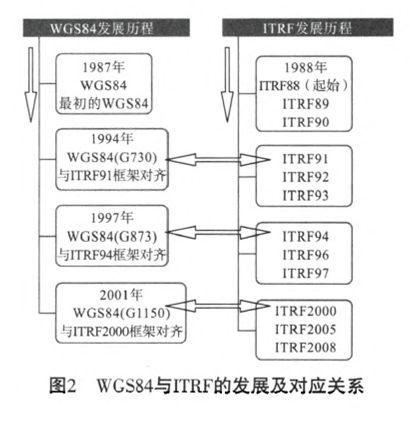
端口:8001 對應坐標框架ITRF2008 參考歷元2016.0
端口:8002 對應坐標框架WGS84 參考歷元2005.0
端口:8003 對應坐標框架CGCS2000 參考歷元2000.0
根據需要接收的坐標系統選擇相應的端口填入
7.源節點獲取:點擊右側“設置”進入獲取源節點界面。獲取了源節點后,根據接收機支持的差分格式選擇不同的源節點
RTCM23_GPS 單星差分格式,只播發GPS差分數據
RTCM30_GG 雙星差分格式,播發GPS、GLONASS差分數據
RTCM32_GGB 三星差分格式,播發GPS、GLONASS、北斗差分數據
8.回到“設置移動站”界面,點擊右上角“設置”,如果所有信息輸入無誤,會提示“設置成功”,稍等片刻便可以得到固定解了。原標題:一次GPS和羅經檢測的經歷 來源:http://www.xiaokcehui.com/?post=286